Исследования в области робототехники постепенно выходят на передник край науки. Роботизированные системы становятся всё сложнее, а системы искусственного интеллекта наделяют их совершенно новым функционалом. Несмотря на это, многие проблемы пока что остаются нерешёнными, например, нет надёжного способа преодоления разного рода препятствий. Над перспективным решением в этом направлении работают сотрудники Университета Нотр-Дам.
Перспективы и трудности
Фактически авторами роботов являются фантасты далекого прошлого, которые придумали механические устройства, способные выполнять различные задачи. Теперь же многочисленные инженеры стараются воплотить в жизнь столетиями складывавшуюся мечту, попутно решая тысячи технических проблем. Одна из них – перевод робота из контролируемых лабораторных условий в реальную жизнь, где тем придётся столкнуться с хаотичным внешним миром. Они даже передвигаться не смогут, поскольку не приспособлены к пересечённой местности. По мнению многих разработчиков, лучшим для роботов способом передвижения являются ноги, поскольку более простые в изготовлении и управлении колёса не справляются с различного рода преградами. Но даже так вполне понятый и привычный живому существу процесс ходьбы для машины превращается в нетривиальную задачу. Одному из инженеров-робототехников из Университета Нотр-Дам, вплотную столкнувшемуся с этой проблемой, пришла в голову интересная идея.
Многие разработчики периодически обращаются к природным явлениям и животному миру, как к первоисточнику. На самом деле, за миллионы лет природа решила неимоверное количество проблем, с которыми человеку приходится сталкиваться в повседневной жизни. Одна из них – это как раз способ передвижения по пересечённой местности, на которой находятся разнообразные препятствия: предметы и ямы самых разных форм и размеров.
Роботизированный рой
Идею способа передвижения подсказали муравьи. Они очень маленькие, но при этом могут пройти буквально по любой местности. Один из исследователей обратил внимание на их поведение, когда дело касается сравнительно больших преград. В таких случаях насекомые действуют как единое целое. Это и натолкнуло на мысли о создании многочисленных небольших роботов, способных объединяться для решения конкретной задачи. Для передвижения роботы используют четыре лапы и несколько элементарных сенсоров. По мнению исследователя, нет никакой необходимости устанавливать сверхсложные датчики для определения характера поверхности, поскольку робот может «чувствовать» её гибкими ногами.
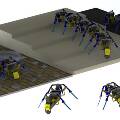
В состав роботов размером 15-20 сантиметров вошли компактный электрический мотор, литий-полимерная батарея, датчик освещённости и два электромагнитных датчика с захватами, распложенных спереди и сзади. Во время самостоятельной работы роботы могут передвигаться в заданном направлении, преодолевать доступные им препятствия и даже переносить при этом небольшой груз. Как только конкретны робот сталкивается с препятствием, которое не может преодолеть самостоятельно, он посылает сигнал всем остальным, чтобы решить возникшую проблему совместно. Как только их собирается достаточное количество, они стыкуются вместе при помощи магнитных захватов и образуют своеобразную механическую многоножку. В таком виде они могут преодолеть большие препятствия, включая провалы, встречающиеся на их пути.
Пока что эта идея находится на этапе концепции. Созданных роботов уже успели протестировать в различных условиях, включая передвижение по ровным поверхностям, газону и по искусственной полосе препятствий, где они смогли продемонстрировать хорошие результаты. По мнению самих исследователей, идея является очень перспективной, но нуждается в дальнейшей доработке. Особенно это касается аппаратной части: чтобы роботы могли принести хоть какую-то пользу, у них должны быть более мощные двигатели и аккумуляторные батареи. Только так можно добиться хорошей производительности и достаточно большого времени автономной работы.